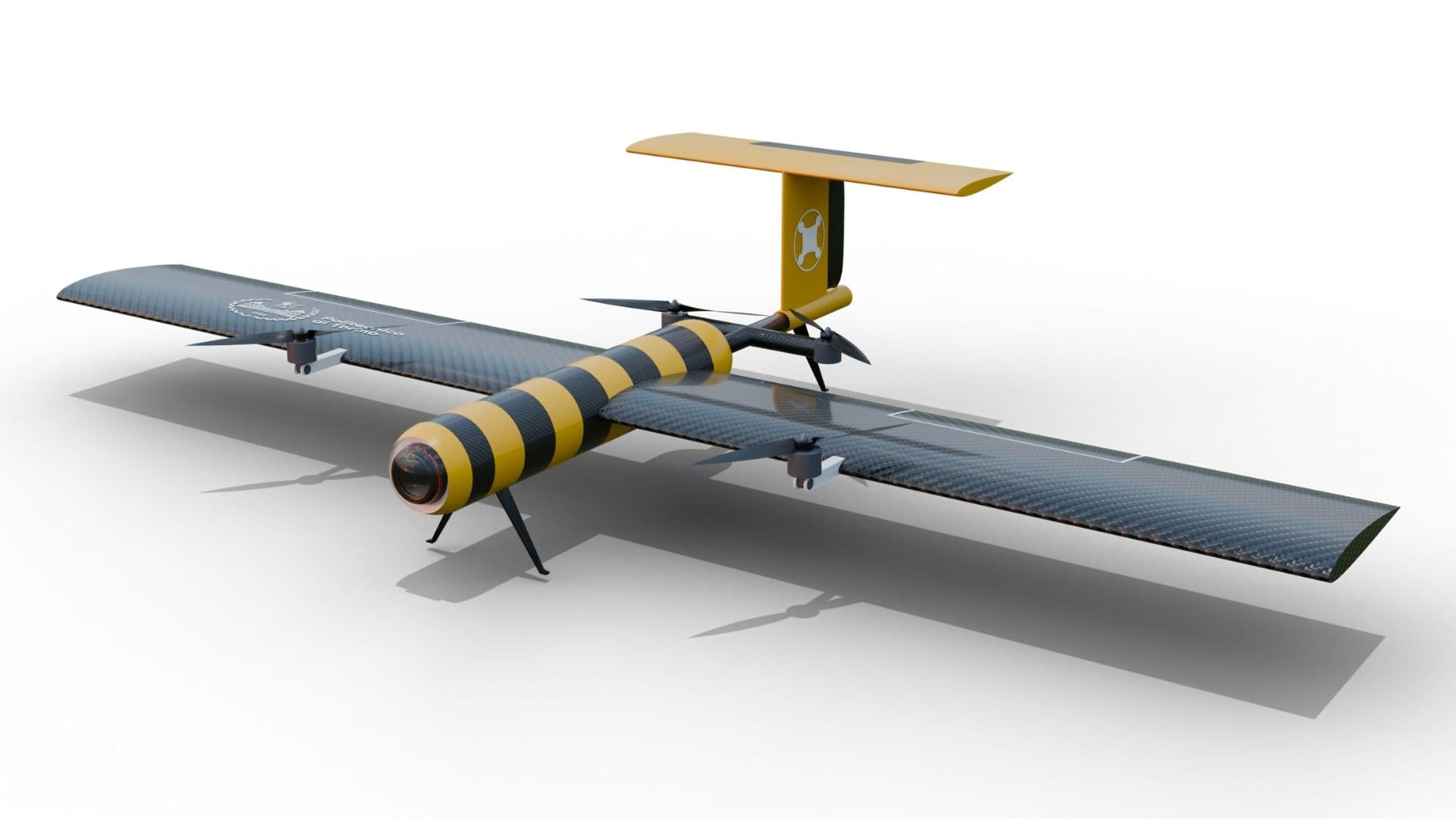
VESPA: The eVTOL Drone for the UAS Challenge 2026
Developed by Team ZEFIRO – 19 at Politecnico di Torino, the VESPA is an electric Vertical Take-Off and Landing (eVTOL) unmanned aircraft designed for the UAS Challenge 2026. With a tilt-rotor configuration and fixed-wing cruise capability, VESPA combines the flexibility of a multirotor with the aerodynamic efficiency of a conventional aircraft.
*"A drone that takes off like a helicopter and flies like a plane — engineered from the ground up by students."*
Key Specifications
Maximum Take-Off Mass: 12,5 KgWingspan: 2.80 m — Wing airfoil: NACA 2412Overall Length: 1.40 m — Fuselage length: 0.90 mPropulsion: 4× T-Motor VL5009 brushless motors with V60A ESCsEnergy: 2× Gens Ace 6S 6000 mAh LiPo batteries in series (12S, 44.4V)Payload: 1 kg water tank (1 L, 3D-printed ASA, tool-free loading)Estimated Range: ~10.67 kmInnovative Design Features
Tilt-rotor VTOL — front motors tilt for transition from hover to fixed-wing cruise, enabling operation from any terrain including wet grassV-tail configuration — adopted to suppress Dutch roll instability in hover and transition phases, improving lateral-directional stabilityTurbulent boundary layer tripping — zig-zag strips at 0.15c to prevent flow separation at low Reynolds numbers (Re ≈ 4.7×10⁵)Fail-closed payload system — spring-loaded solenoid valve ensures water is never released unintentionally in case of electrical failureFruity Chutes IFC-84-SUL parachute — 469 g recovery system with a descent rate of 4.57 m/s for Flight Termination System complianceAvionics & Autonomy
Flight Controller: CubePilot Cube Orange running PX4 AutopilotGNSS: CubePilot Here 4 with RTK precision for accurate payload releaseGCS: QGroundControl with geo-fence, altitude AGL, ground speed and airspeed displayRC Link: FrSky Archer R10 PRO at 2.4 GHz (FHSS, up to 2 km range)Telemetry: Holybro SiK Radio at 433 MHz (up to 100 mW, MAVLink protocol)Safety Architecture
Two externally accessible XT90-S anti-spark safety links (Main + Motor isolation)DroneCAN bus with real-time RPM, temperature and current monitoring per motorAutomatic FTS triggering on geo-fence breach or 5 seconds of RC signal lossFull FMEA analysis covering manufacturing, testing and flight operations phasesZEFIRO Team — Department of Aerospace Engineering, Politecnico di Torino